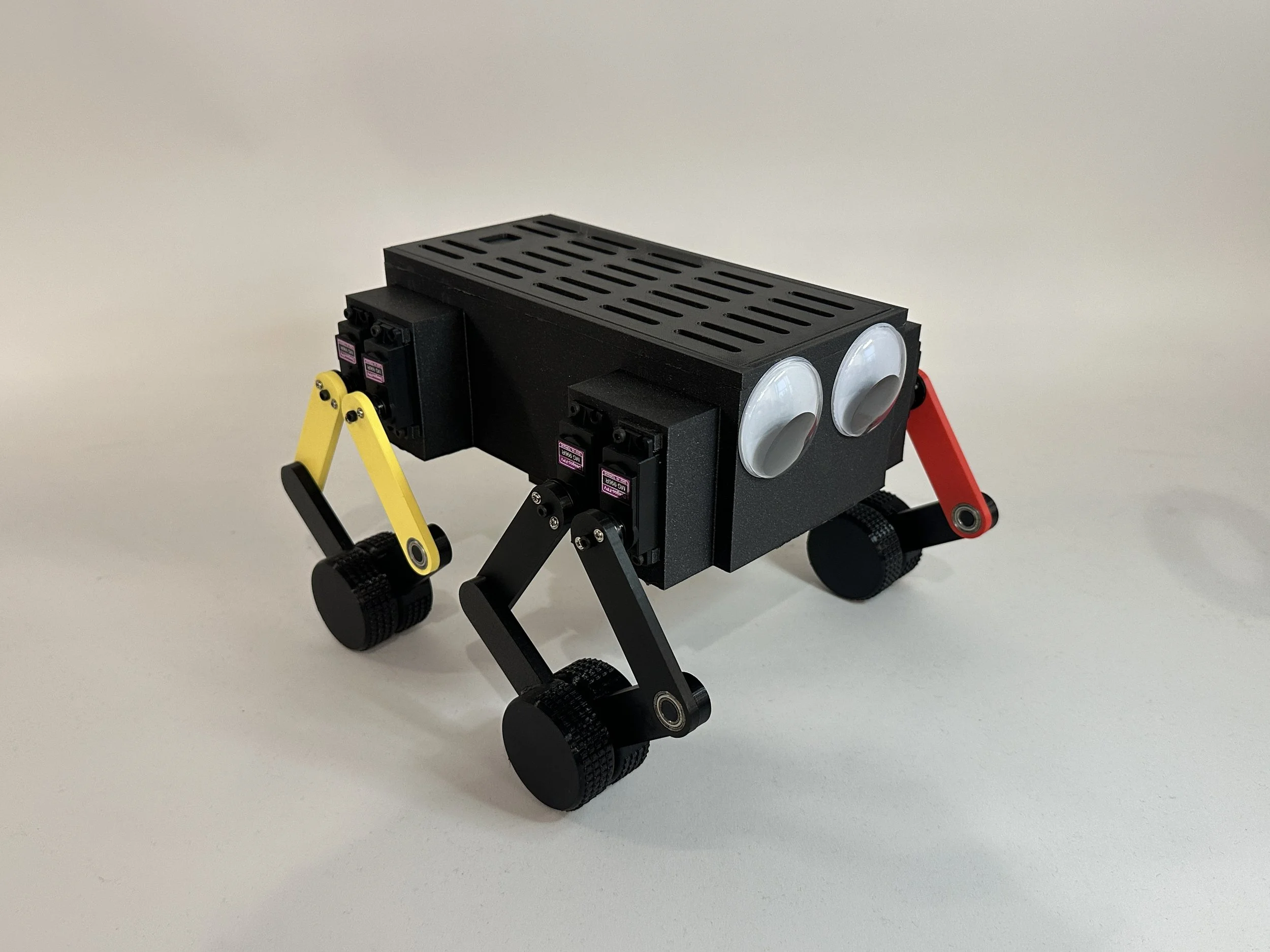
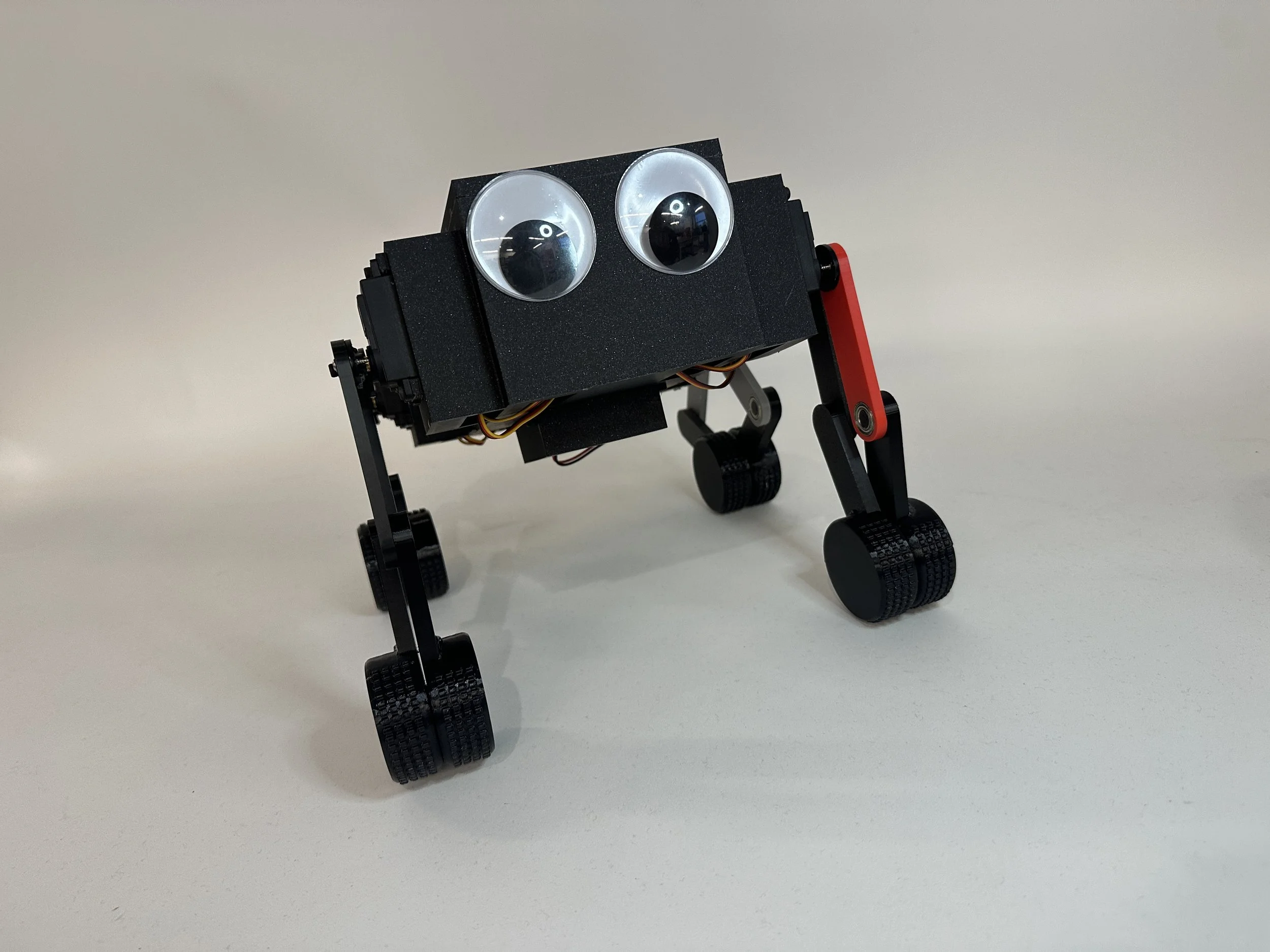
F.R.E.D.
The Fully Responsive Electro-Mechanical Dog is a 3D-printed quadruped robot. The goal was to create a dynamically stable walking robot capable of wireless control, adaptive gait patterns, and expressive behavioral emotes, including sitting and play bow stances, while keeping the cost relatively low for a personal robotics project.
How?
1 Month long project
Total Cost: $100
Fully 3D printed on Prusa Core One & MK4S
Main Chassis is printed out of PLA
Legs printed out of PETG for better impact resistance and durability
Feet printed out of TPU for better traction and shock absorption.
Fabricated a custom PCB on LPKF Protomat, unifying microcontroller, motor controller, motors, and power delivery
Selected as one out of 50+ submissions to present at a project showcase for my University.